Qui sommes nous?
Les supports proprioceptifs
Comment ça-marche ?
Les supports proprioceptifs sont des supports plantaires dynamiques. Par rapport aux supports plantaires / semelles conventionnelles, ils activent ou inhibent votre musculature, la stimulent et apportent de cette manière leurs effets bénéfiques.
Comment ça marche ?
Imaginez que le muscle est un élastique, fixé à deux extrémités correspondant à l’insertion et à la terminaison de ce muscle.
Le tonus musculaire de ce muscle est égal à 100%.
En éloignant l’insertion de la terminaison, on allonge la distance de l’élastique et son tonus musculaire.
L’augmentation du tonus musculaire est reconnue par notre système nerveux. Un message d’alerte de notre centrale de gestion (cerveau) est envoyé à la périphérie. Le tonus musculaire sera diminué.
Par ce mécanisme un muscle hypertonique peut être inhibé par une élongation de la distance entre l’insertion et la terminaison.
Un muscle hypotonique est stimulé par un raccourcissement de la distance entre l’insertion et la terminaison.
La fabrication et le port des supports plantaires proprioceptifs sont très appréciés.
Un centre de fitness se trouve en permanence dans vos chaussures.
Pour ceux qui veulent en savoir plus
Le pied a des tâches particulières pour la stabilisation de la posture verticale et de la locomotion.
Il est l’organe de transmission des charges et il assure et règle la gestion de l’équilibre. Ces fonctions doivent être assurées en permanence, autant en position statique qu’en dynamique.
Pour ce faire, le pied est constitué de 26 os, d’une multitude d’articulations, des muscles et des ligaments. L’ensemble des os, ligaments et muscles stabilise les arches du pied. Le pied est le seul organe, surtout en appui bipodal, ayant un contact réel avec son environnement.
La littérature classique sépare le pied en deux parties : l’arche médiale et l’arche latérale. De plus, il possède une voûte transversale au niveau de l’avant-pied. Le pied est muni d’un grand nombre de capteurs, tous comme le long de la jambe jusqu’au-dessus du genou. Ces capteurs font partie des muscles, tendons, ligaments, capsules etc.
Du fait que le pied possède ces capteurs et qu’il est en contact avec le sol, l’idée ingénieuse de fabriquer des supports stimulant la voie nerveuse afférente pour influencer la proprioception des patients, est devenue possible. Rappelons brièvement le principe d’un support plantaire traditionnel :
Le principe d’une orthèse plantaire est de corriger, par appui osseux, les déformations du pied et/ou le déroulement du pas. La fabrication d’un telle orthèse, d’un mode de correction statique, est faite sur une empreinte encrée, informatisée ou dans une mousse.
Les nouvelles technologies, contrôlant le comportement statique du pied ou ces mouvements dynamiques, n’ont pas encore trouvé assez d’applications dans le diagnostic du pied.
En statique, les orthèses plantaires traditionnelles montrent les corrections souhaitées. Or, l’efficacité d’une orthèse, d’un mode de correction statique rigide, sans respecter le mode dynamique et le processus moteur, est mise en doute. L’orientation de la structure osseuse par ces orthèses orthopédiques traditionnelles donne, selon les études de Stacoff et Nigg, des changements marginaux ou non systématiques du pied ou de la jambe.
Des récentes études, mesurant la répartition des pressions et des forces quantitatives ont aussi démontré la construction tridimensionnelle du pied par ces arches entre le talon et les têtes métatarsiennes I et II. Même la théorie de la cambrure transversale de l’avant pied n’est pas soutenue.
D’un point de vue physiothérapeutique, l’appareillage par une orthèse plantaire n’est utile que lorsqu’elle soutient les déroulements actifs et dynamiques, et qu’elle améliore la proprioception. Selon cette théorie, les orthèses plantaires rigides limitent l’activité musculaire combinée et entrave l’apprentissage des complexes de coordination actifs.
Si les défauts de la statique et de la dynamique sont des effets secondaires d’un défaut fonctionnel primaire du système proprioceptif, l’appareillage doit être ciblé et traiter la cause, qui est le système neuromusculaire. De là est venu le développement d’un support plantaire proprioceptif.
Les problèmes d’un système complexe de nature sensorielle et musculaire ne peuvent pas être corrigés uniquement par redressement et alignement de la structure osseuse. La stabilisation exogène par des appuis mécaniques est de plus en plus accompagnée par une amélioration et une stimulation des points sensoriels. La capacité proprioceptive du pied sera stimulée.
Les mouvements de l’être humain répartis sur la totalité du corps s’effectuent dans des compartiments musculaires différents.
Pour effectuer des mouvements ingénieux, les parties musculaires doivent avoir une connexion fluide. Ainsi, l’on dit que le déroulement des mouvements se passe dans des chaînes musculaires. Des changements de la statique ou du tonus musculaire des muscles du pied ont un effet sur la totalité des chaînes musculaires.
Le but des supports, qui stimulent la voie afférente, est de permettre au patient de faire des mouvements coordonnés par le changement de la proprioception. Le patient, avec un handicap orthopédique ou neurologique, a la possibilité de découvrir ces mouvements modifiés, de les apprivoiser, et par répétition, de les enregistrer dans les programmes de locomotion. Les supports, par rapport au traitement physiothérapeutique ciblé, ont l’avantage de stimuler en permanence les systèmes proprioceptifs du patient.
Evidemment, les supports proprioceptifs ont toujours un effet mécanique au travers de ces appuis. Par ce fait, les supports traditionnels ont un effet proprioceptif.
En observant les liaisons très complexes de la locomotion humaine, on doit forcément se poser la question de savoir si l’effet des orthèses plantaires traditionnelles sur la proprioception est voulu et souhaité.
Plusieurs lits plantaires proprioceptifs sont issus de conclusions de la neurophysiologie et des expériences de la thérapie physique. Il est bien clair qu’aucune de ces orthèses plantaires sont des remèdes à tout.
Il y aura toujours des patients avec des pathologies sévères qui demanderont d’être appareillés par des orthèses jambières ou par des supports traditionnels.
L’orthèse plantaire proprioceptive selon Jahrling
Les physiothérapeutes de la pédiatrie de l’université de Giessen ont fait des examens en série avec des enfants ayant des pieds plats valgus sévères.
Un groupe d’enfants était appareillé par des supports traditionnels et l’autre ne l’était pas.
Un an plus tard les pieds ont été examinés. Ils ont constaté que les enfants non appareillés ont montré un meilleur état du pied que les enfants appareillées. Suite à ce résultat, le bottier orthopédiste M. Jahrling, a réfléchi pour améliorer l’efficacité de ces orthèses plantaires.
En collaboration avec des physiothérapeutes, il a pu développer un tout nouveau concept d’orthèses plantaires qui ont comme particularité, d’influencer les défauts du pied et de la marche par une stimulation neurophysiologique.
Le principe :
La commande centrale de la musculature n’est pas une grandeur fixe. Elle est soumise sous l’influence permanente de la proprioception. Comme déjà cité plus haut, la capacité d’exécuter des mouvements physiologiques dépend de la fonctionnalité de la proprioception.
Un système proprioceptif défectueux ou un défaut de l’intégration centrale nerveuse, ne permet plus de créer un automatisme nécessaire pour les mouvements physiologiques. Non seulement, cette situation crée des déséquilibres musculaires, mais aussi des défauts de la structure osseuse ou d’une locomotion pathologique.
Avec une stimulation périodique des points particuliers de la plante du pied et par un changement précis du bras de levier du pied, la locomotion des patients sera changée.
Dû à une répétition permanente, ces nouveaux mouvements deviennent un automatisme, et ils pourront s’enregistrer comme schéma ou mode de mouvement connu.
Le fait que les muscles de la jambe se terminent au pied, cela nous donne un grand avantage. Le déséquilibre musculaire pathologique peut être influencé par activation ou inhibition de certains muscles.
Pour effectuer une stimulation dans le sens d’un réflexe, le support proprioceptif agit sur les tendons ou ces gaines. Les ventres des muscles ne sont jamais comprimés et ils ont obligatoirement du champ pour leur expansion.
Pour influencer le tonus musculaire le support proprioceptif est équipé de différents points d’information. Ces élévations n’ont pas comme but primaire de former et soutenir la structure osseuse comme les appuis d’un support orthopédique traditionnel. Le support proprioceptif doit, par expansion ou raccourcissement d’un muscle, informer le système sensoriel de quel muscle devra réduire ou augmenter son tonus musculaire. Selon ce principe l’activité musculaire sera influencée.
Par une diminution de la longueur d’un muscle, ce dernier pourra être activé à travers la topographie du support.
Le rapprochement de l’insertion et de la terminaison d’un muscle diminue son tonus. Le système nerveux central en sera informé.
Le tonus musculaire prévu et enregistré dans le système nerveux central n’est pas suffisant ; alors le résultat sera une augmentation du tonus musculaire. Le muscle sera activé.
La détente d’un muscle, qui se fait par la topographie du support plantaire, donne l’information pour une augmentation du tonus musculaire.
Pour inhiber un muscle, sa longueur doit être rallongée par les supports. En rallongeant la longueur du muscle, la tension musculaire augmente. Le système nerveux central vérifie et remarque cette augmentation du tonus musculaire. Le tonus musculaire prévu et enregistré dans le système nerveux central ne correspond pas et la réaction sera une diminution de tonus musculaire.
Une pré-tension d’un muscle, qui se fait par la topographie du support plantaire, donne l’information pour une diminution du tonus musculaire.
Le degré d’influence est donné par la hauteur de l’appui. Ce qui est très important, c’est l’utilisation bien définie et correcte des points d’informations.
Des bonnes connaissances de l’anatomie fonctionnelle, de la locomotion humaine et de la marche pathologique permettent de reconnaître les défauts musculaires et leurs causes.
L’efficacité d’un support proprioceptif ne peut pas seulement être garantie par des capteurs et voies nerveuses saines, ni par la répétition des mouvements qui permettent de prendre l’automatisme des schémas de locomotion.
Construction du support plantaire
À première vue, le support proprioceptif ne se distingue en rien d’un support plantaire traditionnel. La pelote retro-capitale, et les recueils de voûtes médial et latéral existe sur la majorité des orthèses plantaires. Toutefois, il existe plusieurs différences quant à la fabrication de ces deux types de supports.
La construction du support traditionnel montre un contact continu dit de grande surface pour soutenir l’architecture osseuse du pied. La topographie beaucoup plus convexe du support proprioceptif est construite de manière à ce que les pelotes prennent appuis sur les tendons des muscles. Il n’y a pas d’appui complet pour la plante du pied.
Information médiale :
Le sommet du point d’information médial se situe sous le sustentaculum tali. Premièrement cette pelote aligne et redresse le voûte interne de manière statique, deuxièmement elle possède un devoir proprioceptif, lequelle est l’activation du muscle jambier postérieur et l’amélioration du temps de réaction du groupe musculaire tibiale. L’effet dynamique de la surélévation médiale est le raccourcissement du bras de levier médial de l’avant-pied et du bras de levier latéral de l’arrière-pied. Le résultat est une diminution de la rotation externe du pied lors de son déroulement.
Le redressement proprioceptif se fait par un raccourcissement du muscle suite un rapprochement de l’insertion et la terminaison du muscle. Le muscle s’active davantage par son raccourcissement et stabilise la voûte interne pendant la phase d’appui par son propre effort. L’activité musculaire se fait au bon moment et elle se montre plus efficace même bien avant que le pied soit en appui complet.
Une pression medio-latérale et postérieure du talon/calcanéum montre un redressement significatif du pied. Le muscle tibial antérieur et le long péronié permettent cette amélioration.
La pelote latérale stimule le long et court péronier. En statique, elle redresse l’arche latérale et est un contre-appui de la pelote médiale. Le calcanéum est centré et le pied est guidé lors de l’attaque du talon (contact initiale) jusqu’à l’appui moyen. En dynamique la rotation externe sera légèrement soutenue.
La pelote rétro-capitale augmente la pression sur les tendons proximaux des têtes métatarsiennes. Elle effectue ainsi une pré- tension de la musculature liée à ces tendons. La musculature du mollet, surtout le muscle gastrocnémien reçoit la stimulation pour détendre l’aponévrose plantaire.
En prolongeant l’appui rétro-capitale jusqu’au bord latéral, l’arche latérale du pied sera étiré. Le résultat sera l’inhibition du muscle tibiale antérieur. L’effet dynamique de cette modification est l’abduction et la pronation de l’avant-pied.
La pelote sous les orteils II-IV a un effet d’extension des orteils. Dû à cette extension, la musculature proximale se détend. De plus, la pulpe des orteils est équipée, tels les bouts des doigts de la main, avec une multitude de terminaisons nerveuses, lesquelles donnent des informations précises de la pression et du positionnement. L’information du positionnement peut être intensifiée par un contact discontinu. L’effet dynamique de cette pelote se fait lors la propulsion du pas. Les orteils sont poussés en avant et à l’extérieur. Ce déplacement influence la rotation externe et la pronation de l’avant-pied.
Pour la diminution du bras de levier du compartiment médial, l’articulation MP1 est positionnée en dessous des articulations MP II-V. L’articulation MP1 est posée dans une partie concave du support plantaire.
Avec un bras de levier du compartiment médial trop long, le pied sera poussé en supination pendant la propulsion du pas. Pour améliorer la pronation physiologique pendant la propulsion du pas (le pied subit une torsion complète) le bord antéro-externe du support peut être surélevé.
Les pelotes, appelées « points d’information », ne sont pas universelles. Elles doivent être adaptées à la pathologie de la marche ou à la déformation du pied même. Elles sont personnalisées et répondent précisément aux indications.
Les supports sont équipés uniquement avec les points d’informations nécessaires. Les patients ne reçoivent pas forcément la palette entière de toutes les modifications.
Les ventres des muscles, représentant la partie active des mouvements, l’aponévrose plantaire, prolongement du tendon d’Achille, ne doivent jamais être sous pression. La tubérosité du métatarse V, qui est sensible, doit être libérée et abaissée.
Les muscles stimulés par les supports proprioceptifs :
Muscle extenseur commun des orteils / Musculus extensor digitorum longus:
Le muscle extenseur commun des orteils soutient dans la phase d’appui le muscle jambier antérieur et le muscle extenseur propre du gros orteil par une activité musculaire excentrique.
Son activité soutient le bras de levier du calcanéum (heel rocker) et il tourne l’avant-pied en supination.
Sa fonction principale est durant le contact initial (Initial contact) et durant la phase d’amortissement (Loading response).
Pendant la phase pendulaire, il fléchit l’articulation tibio-tarsienne en flexion dorsale et il fait l’extension des orteils II-V.
Son innervation se fait par le nerf péronié profond.
Muscle extenseur propre du gros orteil / Musculus extensor hallucis longus :
D’un part, le muscle extenseur propre du gros orteil soutient pendant la phase d’appui, par force excentrique, le bras de levier du calcanéum, d’autre part, il soutient légèrement la supination et la pronation de l’avant-pied.
Son activité musculaire se fait surtout au contact initial (Initial contact) et en phase d’amortissement (Loading response). Pendant la phase pendulaire, il fléchit l’articulation tibio-tarsienne en flexion dorsale et il fait l’extension et l’abduction du gros orteil.
Son innervation se fait par le nerf péronier profond.
Muscle long fléchisseur commun des orteils / Musculus flexor digitorum longus :
Le muscle long fléchisseur commun des orteils fléchit les orteils II-V et soutient la flexion plantaire de l’articulation tibio-tarsienne.
Il travaille pendant les phases : moyen appui (Mid stance), appui terminale (Terminal stance) et Pré-pendulaire (pre-swing).
Son innervation se fait par le nerf tibial.
Muscle long fléchisseur propre du gros orteil / Musculus flexor hallucis longus :
Le muscle long fléchisseur propre du gros orteil fléchit le gros orteil et est responsable de la supination de l’avant-pied.
Il travaille pendant les phases : moyen appui (Mid stance), appui terminale (Terminal stance) et Pré-pandulaire (Pre-swing).
Son innervation se fait par le nerf tibial.
Muscle court péronier latéral / Musculus peronaeus brevis :
Le muscle court péronier latéral fléchit l’articulation tibio-tarsienne et soutient la pronation dans l’articulation sous-astragalienne.
Son activité principale se fait pendant les phases : moyen appui (Mid stance) et appui terminale (Terminal stance). Il travaille en synergie avec le muscle long péronier latéral pour la stabilisation de l’articulation sous-astragalienne.
Son innervation se fait par le nerf péronier superficiel.
Le muscle long péronier latéral / Musculus peronaeus longus :
Le muscle long péronier latéral est le plus fort pronateur de l’articulation sous-astragalienne.
La flexion de l’articulation tibio-tarsienne se fait aussi par son activité.
Son activité principale, comme stabilisateur de l’articulation sous-astragalienne, se fait pendant les phases : moyen appui (Mid stance) et appui terminale (Terminal stance).
Son innervation se fait par le nerf péroné superficiel.
Chair carré de Sylvius / Musculus quadratus plantae :
La flexion des phalanges distales des orteils se fait par l’aide de la chair carré de Sylvius.
Une contraction de ce muscle tire l’avant-pied, à travers du tendon du muscle long fléchisseur commun des orteils en abduction.
Son innervation se fait par le nerf plantaire latéral.
Muscle jambier antérieur / Musculus tibialis anterior :
L’activité du muscle jambier antérieur pendant les phases de contact initial (Initial contact) et de phase d’amortissement (Loading response) se fait de manière excentrique.
C’est le muscle le plus fort pour le bras de levier de calcanéum.
Par freinage, il évite le claquement de l’avant-pied sur le sol. Par sa tension musculaire, le muscle jambier antérieur tire le tibia en avant et fléchit le genou d’environ de 15°.
Pendant la phase pendulaire, il fléchit dans l’articulation tibio-tarsienne et fait une supination dans l’articulation sous-astragalienne.
Son innervation se fait par le nerf péronier profond.
Muscle jambier postérieur / Musculus tibialis posterior :
La fonction principale du muscle jambier postérieur est de stabiliser la voûte interne du pied pendant la phase d’appui. Il travaille surtout pendant les phases d’amortissement (Loading response), moyen appui (Mid stance) et appui terminale (Terminal stance).
Son activité pendant la phase pendulaire se manifeste dans l’articulation tibio-tarsienne par une flexion et dans l’articulation sous-astragalienne par l’inversion.
Son innervation se fait par le nerf tibial.
L’hyper tonus du muscle jumeaux de la jambe entrave le bon fonctionnement du muscle jambier postérieur, car celui-ci est comprimé.
Classement fonctionnel
Du point de vue fonctionnel, le système proprioceptif peut être séparé en trois segments : le premier est sensoriel, la deuxième est le sens de la force du mouvement et le troisième est le positionnement.
Avec le sens de la force, nous reconnaissons l’amplitude musculaire que nous appliquons pour effectuer un mouvement ou pour maintenir une certaine position du corps. Le fuseau musculaire et les récepteurs des tendons sont responsables de cette détection.
Le sens du positionnement nous donne l’information, avec l’aide des organes de l’équilibre et ceux de la vision, de la perception subjective du positionnement du corps dans l’espace. Il nous oriente même sans recevoir d’autres signaux d’informations tels que la vue ou le toucher. Grâce à lui, nous avons la capacité de reconnaître la position de nos articulations.
La perception de reconnaître un positionnement, avec les angles articulaires, s’avère plus juste par une position active que passive. Les récepteurs de la capsule articulaire et des ligaments nous donnent les informations nécessaires pour la perception des angles articulaires et des amplitudes.
Le sens des mouvements donne la perception des directions et de la vitesse des mouvements. Le seuil de la perception dépend fortement de la vitesse angulaire. Pour la transmission, le sens des mouvements utilise des récepteurs des capsules articulaires et ceux des ligaments.
Les récepteurs de la proprioception
Ce sont les récepteurs situés dans les structures articulaires, la musculature, les tendons et la peau, qui forment les senseurs de la proprioception.
Ces senseurs sont classés dans la famille des récepteurs mécaniques. Ils captent les stimulations mécaniques et les transforment en excitation nerveuse.
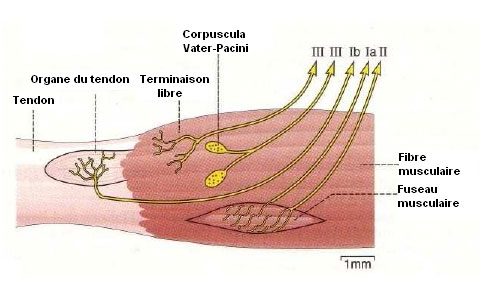
Les proprio-récepteurs contiennent les récepteurs de la traction/expansion/élongation (fuseau musculaire), les récepteurs de la tension (récepteurs de Golgi) et les organes de la capsule articulaire (corpuscule de Vater-Pacini et corpuscule de Ruffini). Ces récepteurs donnent toutes les informations, concernant les positions, mouvements et forces, au système nerveux centrale venant de l’appareil locomoteur.
Morphologie |
Simulation adéquate |
Caractéristiques d’adaptions |
Information |
Fuseau musculaire |
Expansion du muscle
(longueur) |
lent |
Longueur musculaire |
Organe de Golgi |
Expansion du muscle
(tension) |
lent |
Force musculaire |
Terminaisons libres |
Mouvements des articulations,
pression, douleur |
lent |
Proprioception |
Corpuscule de Ruffini |
Pression et expansion du tissue |
lent |
Position articulaire
Mouvement articulaire |
Corpuscule Vater-Pacini |
Vibration et accélération |
Très rapide |
Accélération de la vitesse d’angle |
Les corpuscules lamelleux de Vater-Pacini sont des senseurs captant les vibrations. Ils se situent dans les tissus gras sous cutanés, mais aussi les tendons, les articulations et les ligaments. Ce sont les plus grands récepteurs mécaniques des mammifères et sont très nombreux dans le corps humain. Ils s’adaptent très vite, et possèdent le seuil de stimulation le plus bas de tous les récepteurs mécaniques. Ils réagissent seulement au changement de la vitesse de la stimulation : ç’est à dire à l’accélération et à l’intensité.
Ils sont capables de reconnaître l’accélération de la vitesse d’angle.
Les corpuscules terminaux de Ruffini sont les récepteurs du positionnement et des mouvements des capsules articulaires. On les trouve dans la peau, mais aussi dans la partie fibreuse externe des capsules articulaires. Ils s’adaptent très lentement et ont un seuil de stimulation très bas. La stimulation adéquate du corpuscule de Ruffini est la pression, mais ce récepteur réagit surtout à l’extension du tissu. La fonction du corpuscule de Ruffini est d’indiquer la position articulaire statique, les changements de pression intra articulaire et atmosphérique, les directions, les impulsions et la rapidité d’un mouvement articulaire passif et actif.
Les terminaisons nerveuses libres sont des récepteurs spécifiques de la tactilité et de la douleur dans différents tissus. Dans le système de la senso-motricité, ils se trouvent dans la musculature, les ligaments et dans la partie fibreuse et synoviale de la capsule articulaire.
Ils ont en seuil de stimulation très élevé et ne s’adaptent pas.
Les organes des tendons, connu sous le nom de Golgi, fournissent les informations de l’état d’expansion de la musculature. Ils se situent dans les tendons, et ont une architecture sérielle.
La stimulation adéquate de ces récepteurs de Golgi est le rallongement de chaque muscle. Ils ne nous indiquent pas la longueur musculaire, mais la tension du muscle. Les récepteurs de Golgi mesurent la force active et passive, développée par la contraction ou l’expansion d’un muscle. Avec une longueur du muscle stable, dite au repos, et pendant une contraction isométrique, les organes de Golgi ne réagissent pas. Suite à un développement d’une force active, ils réagissent très sensiblement et s’adaptent très lentement. Leur sensibilité est de nature statique et ils travaillent comme un senseur proportionel.
Dans la musculature, il y a d’autres récepteurs mécaniques : ce sont les fuseaux musculaires. Ils nous informent de l’expansion musculaire. Ils sont alignés en parallèle avec la structure musculaire. Ces cellules musculaires spécifiques sont situées seulement aux extrémités des myofibrilles et sont absents de la partie sensible et sensorielle centrale du muscle.
Leur stimulation adéquate est l’expansion du muscle, mais ils n’indiquent pas la tension musculaire. C’est la longueur et la vitesse d’expansion qui sera indiquée. Ils ont une sensibilité statique (longueur du muscle) et une sensibilité dynamique (vitesse du mouvement).
